


Research HighlightsThe Future of Weed Management is Automation
In this article, you’ll find details on:
- Indiana researchers are looking at new ways to increase automation for better weed management.
- Using specially designed maps of soil types and weed seedbank locations helps applicators apply higher herbicide rates where needed and less where it’s not.
- UAVs can work together with on-the-ground robots, or UGVs, for automated weed termination.
By Carol Brown
Farmers of a certain age can reminisce about “walking beans.” They walked up and down rows of soybeans to cut out any weeds and volunteer corn growing in the field. This was a rite of passage for farm kids and local teens, and may have been their first paying job.
Weed management has come a long way since then. It is advancing quickly through new technology that goes beyond a sprayer driven through a field to apply herbicides. Purdue University researchers Bryan Young and Dharmendra Saraswat are focusing on automation to advance weed management technology for greater success and future applications. The project is supported by the Indiana Soybean Alliance.
Young, a weed science professor, is approaching weed management from the soil and seedbank aspect. Saraswat, an agriculture and biological engineering professor, is developing technology that integrates unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs) for automated weed control.
“The goal of the project is to look at better management of weeds where they are growing instead of treating the whole field the same way,” remarks Young. “We have the capability to spray just certain areas of a field, and because of advancements in robotics and sensors, we are applying this technology to find ways to manage weeds better.”
Prescription Maps for Controlled Applications
Young is looking at optimizing residual herbicide applications at soybean planting to improve weed management. One way is to apply herbicide at higher rates only where it’s needed.
“When reading the herbicide labels, the application rates are based off soil organic matter and soil texture,” Young explains. “Growers commonly would use an average of their soil test results to apply the same rate of herbicide across a field. But fields are not uniform in their organic matter or soil texture and this can influence weed growth.”
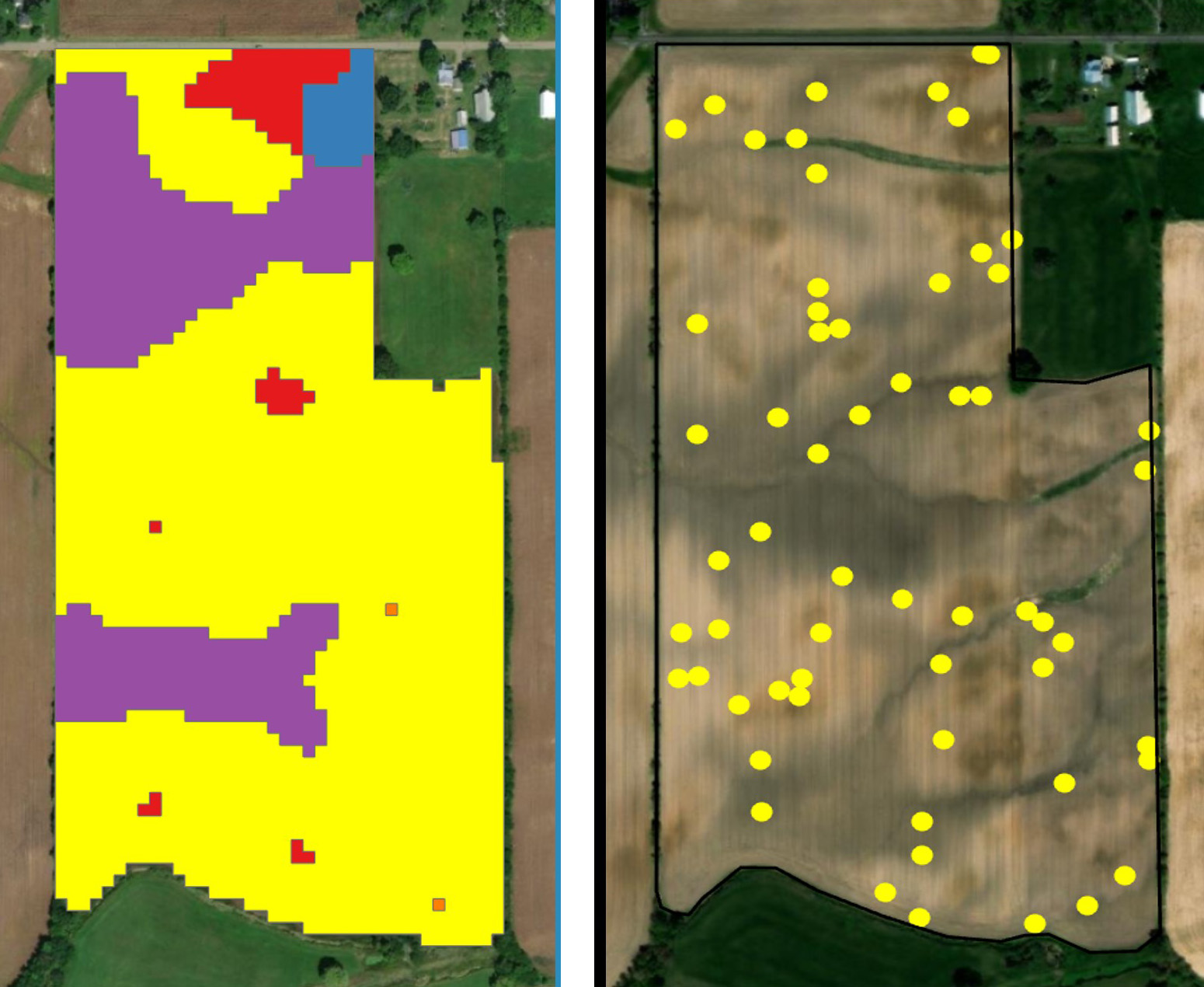
Young and his team are building “prescription” maps that indicate the variability in soil type in a field so herbicide application rates can change based on this information. Typically, rates are higher for soils that have more clay content and high organic matter, and lower for more sandy soils. After the first year of research, they didn’t see a consistent response in weed control by only using soil type indicators.
This year, Young is using another influential factor: the soil seedbank. This takes a little more sleuthing to locate high densities of weeds, especially early in the season when weeds are still small. Young quickly found the more obvious weed population locations such as field entrances, end rows, and next to waterways. His team is adding these locations into the prescription maps. And Young is taking this a step further using satellite images captured throughout the growing season to locate historically problematic weed areas.
“Satellite imagery is taken about once a week and we have public access to those images for the last five years,” Young explains. “Through these images, we can develop an idea of where weed escapes keep occurring, which is an indirect indicator of weed seedbank levels. We can then focus on higher herbicide application rates in those areas.”
A prescription map can help a farmer make their herbicides work more effectively. Young’s research showed the total amount of herbicide applied through the prescription maps was nearly the same as if it were applied consistently across the field. The variable rate application was higher in some areas and lower in others, which was more effective in controlling weeds.
Young can see these maps being incorporated into a sprayer, providing the “see and spray” technology with even more information for early-season herbicide application success.
Automation in the Air and on the Ground
The other portion of this research project is looking at fully automated weed management. Saraswat is coordinating unmanned aerial vehicles (UAVs) with unmanned ground vehicles (UGVs) for more precise weed control.
“Our idea is to create an automated system where a UAV and a UGV, or ground robot, fitted with sensors can work in an integrated fashion for improved crop management,” says Saraswat. “The UAV, or drone, captures what it sees when flying over a crop field, analyzes the image using a customized mechanism to identify the weed of interest on the go, and relays this information to the farmer through a smartphone or directly to a UGV. The farmer could send a human scout to the location to decide on the appropriate response. When the information is sent directly to the ground robot, it can navigate to the particular location to perform further diagnosis or spray the weed.”
UAVs do crop scouting well, although they have limitations including power constraints due to battery life and the drone’s overall weight, Saraswat says. Coordinating UAV scouting knowledge with a ground robot allows both automated machines to work well.
“When we first started on this research, we identified a model for the UAV that would identify two crucial items: which weed it was and where it was located,” says Saraswat. “We customized the drones with this model and ensured it could send this information to the robot on the ground.”
However, as he and his team conducted the experiments, they encountered a hurdle that had to be overcome.
“Once the ground robot had the coordinates of the weed, it needed to know how to get to it,” he comments. “Since getting to the desired plants may involve turns at the end of the row, my team had to experiment with approaches to ensure the UGV didn’t accidentally damage the plants during those turns.”
To test end-of-row turning approaches, his team utilized advanced simulation techniques to create a virtual environment that mirrored farm fields. The simulation allowed them to experiment with the UGV’s turning capabilities, which helped them avoid plant damage (Figure 1).
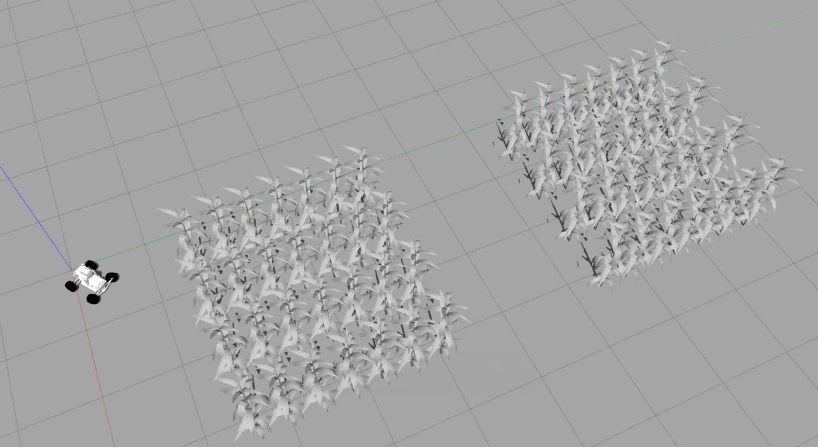
The next-level challenge Saraswat and his team are focusing on is developing fully autonomous navigation capabilities for the UGV to travel to the target plant. While this is one of the biggest challenges his team is working to overcome, they have evaluated a few possible approaches in the virtual environment, he says. He intends to someday have weed management completely automated, where a UGV parked at the field edge uses input from a UAV to follow a specific path to terminate a weed. This process would be similar to a high-end Roomba, but with strict instructions on where to travel and what to do when it arrives at the target.
With the combination of accurate mapping of weed pressure and soil type, aerial scouting by a drone, and on-the-ground robotics to terminate weeds, the future of weed management may only need human interaction to fill a tank and switch out a battery — a far cry from walking beans.
Published: Nov 18, 2024




